Automatic Generation of Dynamic Parking Maps based on Crowd-Sensing
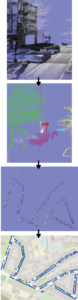
More and more modern vehicles are equipped with multiple sensors which perceive their surroundings. These sensors can be used to detect parked vehicles on the street. Combining the sensor data contribution of many vehicles, the information of parked vehicles at different times for the full city area can be obtained.
This project focuses on the generation of parking maps from this data using machine learning techniques. The spatio-temporal distribution of parked vehicle detection allows to determine legal parking spaces. Challenges are the inaccuracy of the sensors as well as the parking behavior of drivers who not always adhere to the law. The identification of spatio-temporal patterns shall facilitate the generation of a robust parking map.
In addition to this static information of legal parking spaces, methods shall be developed to extend the parking map by dynamic content. This may contain the variation in parking allowance for e.g. major events or knowledge about currently available parking spots. Furthermore the communication of this data both centralized and decentralized shall be investigated.
Researcher: Dipl.-Phys. Fabian Bock
Student Research Projects
2015
Learning of legal parking maps from positions of parked vehicles (Jason Liu, DAAD RISE)
Automated identification of parking lanes in topographic data (Simone Görler)
Mobile Mapping in 4D (Eva Kemkes, Dennis Elschen, Carolin Böhme)
Identification of dynamic objects based on radar maps (Matti Henning)