Forschungsprofil
Die Stadt- und Umweltverträglichkeit stellt neben der Verkehrssicherheit die zentrale Herausforderung für die Entwicklung der zukünftigen urbanen Verkehrssysteme dar. Kooperation unter den Verkehrsteilnehmern sowie zwischen ihnen und ihrer Umwelt ist ein Schlüsselelement, um diesen Anforderungen besser gerecht zu werden. Um kooperative Ansätze für die Assistenz der Verkehrsteilnehmer entwickeln zu können, die einen signifikanten Beitrag zu dieser Zielsetzung leisten, ist es erforderlich, die dynamischen Wechselwirkungen zwischen Verkehrsteilnehmern mit ihren unterschiedlichen Verkehrsmitteln und der Infrastruktur in psychologischer und technischer Hinsicht zu verstehen und in Modellen nachbilden zu können. Aufbauend darauf können Strategien und Verfahren des kooperativen Verkehrsmanagements entwickelt werden.
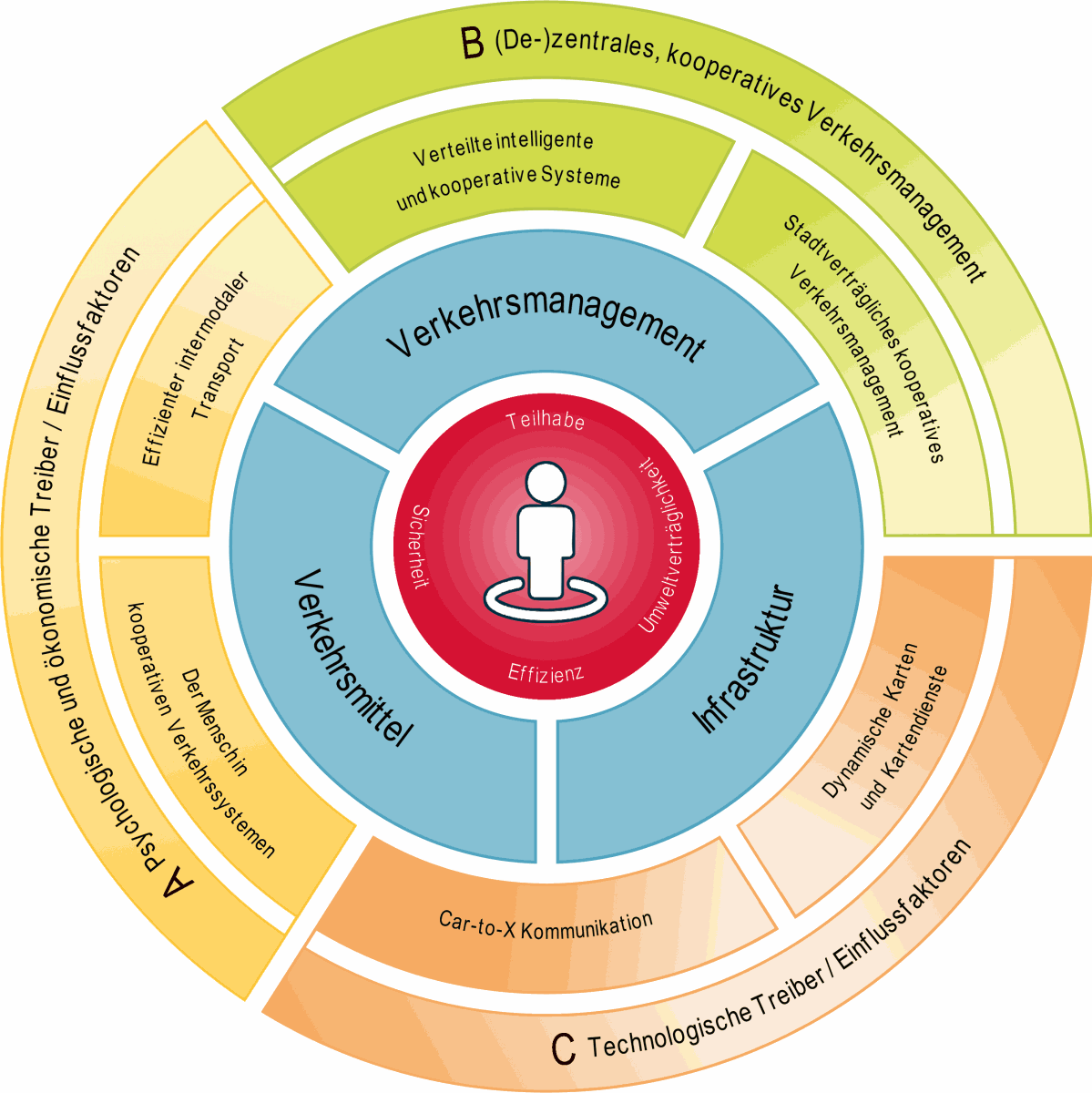
Für das Verständnis dieser Zusammenhänge wird der Mensch als Verkehrsteilnehmer in den Mittelpunkt der Betrachtung gestellt (siehe Abb. 1). Er bewegt sich in einem Verkehrssystem, das durch den Stadtraum, d.h. die gebaute Infrastruktur, die dort zur Verfügung stehenden Verkehrsmittel charakterisiert ist und durch die Regelungen des kooperativen Verkehrsmanagements beeinflusst wird. In seinen Entscheidungen wird er von technischen Systemen unterstützt. Die zukünftige Entwicklung wird dabei ausgehend von heutigen Fahrerassistenzsystemen, die den Fahrer informieren und warnen, zu kooperativen Assistenzsystemen verlaufen, durch die zusätzlich die Entscheidungen der einzelnen Menschen berücksichtigt werden und in das dynamische Verkehrsmanagement eingehen.
Die Forschung im Graduiertenkolleg untersucht das Zusammenwirken von zentraler (systemoptimaler) Steuerung und dezentralem (nutzeroptimalem) Handeln sowie die Entwicklung von dynamischen Modellen, in denen beide Sichten berücksichtigt werden. Im Graduiertenkolleg sollen diese komplexen Fragen des (de)zentralen kooperativen Verkehrsmanagements aufgegriffen werden und die Qualifizierung des wissenschaftlichen Nachwuchses mit einschlägigem fachlichen und überfachlichen Wissen erfolgen.
Car-to-Car-Kommunikation/-Information, Kooperation und Fahrerassistenz unter den Gesichtspunkten Komfort und Sicherheit sind Gegenstand zahlreicher laufender und abgeschlossener Projekte. Das Kriterium der Effizienz solcher vernetzter kooperativer Systeme, in denen insbesondere der raumzeitliche Zusammenhang des Verkehrs in seiner Komplexität in Verbindung mit Vorgaben aus systemweiter Sicht durch ein zentrales Verkehrsmanagement Berücksichtigung finden und mit Modellen lokaler Akteure integriert werden, wurde bislang nur in ersten Forschungsansätzen behandelt. Wenig berücksichtigt wurden dabei die Wahrnehmung und Bewertung durch die Verkehrsteilnehmer, deren Ziele und ihre Reaktionen auf entsprechende Vorschläge und Maßnahmen. Auch die Fragen der dynamischen Datenhaltung wurden in der Forschung um kooperative Verkehrssysteme bislang noch kaum berücksichtigt.
Die für das Funktionieren im gesamtgesellschaftlichen Rahmen erforderliche Integration der dezentralen Entscheidungen von Nutzern und lokalen Systemen in die gesamtstädtische Verkehrsplanung ist somit die zentrale Gesamtinnovation des Graduiertenkollegs SocialCars, das damit weit über den Stand der Forschung im Bereich des aktuellen Verkehrsmanagements hinaus weist.
Weitere Dokumentationen von Forschungsprojekten finden Sie hier: https://socialcars.github.io