Modellierung der Interaktion zwischen verschiedenen Arten von Verkehrsteilnehmern in Shared Spaces
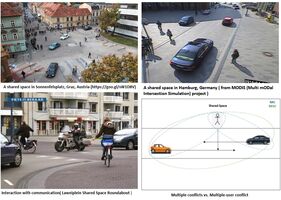
Die Hauptmotivation dieses Projektes ist die Modellierung der strategischen Interaktion bzw. der Konfliktbearbeitung zwischen Verkehrsteilnehmern in einer Shared Space Umgebung. In Gemeinschaftsräumen gibt es verschiedene Verkehrsmittel wie Fußgänger, Radfahrer, motorisierte Fahrzeuge und öffentliche Verkehrsmittel. Darüber hinaus basiert die Bewegung der Verkehrsteilnehmer in solchen auf der Grundlage eines Sozialprotokolls (z. B. Höflichkeitsverhalten) und informeller Regeln (z. B. farbige Böden). Teilnehmer interagieren häufiger zur Verhandlung bzgl. ihrer Prioritäten in einem Shared Space. Das Ergebnis eines komplexen menschlichen Entscheidungsprozesses ist die Interaktion zwischen verschiedenen Benutzermodi in Shared Spaces. Ziel dieses Projekts ist es, ein Hybridmodell zur Nachahmung des oben genannten Verhaltens zu entwickeln, welches beides beherrscht:
-
automatische Benutzerreaktionen
-
sowie die komplizierte Entscheidungsfindung
In einer einfachen Situation kann die reaktive Interaktion zwischen den Teilnehmern durch physische Ansätze modelliert werden, wie bspw. das soziale Kraftmodell von Helbing und Molnar (1995)[1], das die Interaktion zwischen Fußgängern modellierte. Das soziale Kraftmodell wird in Rinke et al. (2017)[2] und Schönauer et al. (2012)[3] für andere Verkehrsträger erweitert. Jedoch sind, um den komplexen menschlichen Entscheidungsprozess zu modellieren, andere Ansätze aus der algorithmischen Spiel- und Entscheidungstheorie besonders vielversprechend.
In dieser Arbeit wird die reaktive Interaktion (operative Ebene) zwischen den Verkehrsteilnehmern durch ein generalisiertes soziales Kraftmodell modelliert. Darüber hinaus wird der komplexe Konflikt zwischen den Nutzern mit einem spieltheoretischen Ansatz modelliert, der bei [3] beginnt. Das Modell in [3] löst jedoch nur einzelne Konflikte zwischen zwei Verkehrsteilnehmern und berücksichtigt nicht alle zu diesem Zeitpunkt auftretenden Konflikte. Diese Forschung zielt darauf ab, diese Lücke zu schließen. Die Validierung des Modells wird unter Verwendung vorhandener realer Trajektorien aus einer gemeinsamen Raumumgebung geplant, die aus einem früheren Projekt aus SocialCars verfügbar ist. Schließlich sollen Querbeziehungen zwischen Parametern des spieltheoretischen Interaktionsmodells und Aspekte des Shared Space Designs unter Berücksichtigung von Sicherheitsfragen und der Effektivität, die das Interaktionsverhalten von Verkehrsteilnehmern als informelle Regeln beeinflussen können, untersucht werden.
References:
-
Helbing, Dirk, and Peter Molnar. "Social force model for pedestrian dynamics." Physical review E 51.5 (1995): 4282.
-
Rinke, N., et al. "A multi-layer social force approach to model interactions in shared spaces using collision prediction." Transportation Research Procedia 25 (2017): 1249-1267.
-
Schönauer, Robert, et al. "Modeling concepts for mixed traffic: Steps toward a microscopic simulation tool for shared space zones." Transportation Research Record: Journal of the Transportation Research Board 2316 (2012): 114-121.
-
Johora, F. T., Kraus, P., Müller, J. P. (2017). Dynamic path planning and movement control in pedestrian simulation. In: van Dam, K. H., Thompson, J. (eds.) Preproceedings of the 2nd International Workshop on Agent-based modelling of urban systems (ABMUS 2017). Publisher tbd, Sao Paulo, Brazil (May 2017) Accepted for workshop. Details
Forscherin: Fatema Tuj Johora, M.Sc.