Kooperatives Fahren
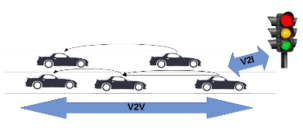
Die Fahrzeugkommunikation schafft die technischen Voraussetzungen für zukünftige kooperative Systeme in den Bereichen Fahrerassistenz, automatisiertes und autonomes Fahren. Im Vergleich zu aktuellen Fahrerassistenzsystemen, wie z.B. Abstandsregeltempomat oder Spurwechselassistent, die auf ihre Umgebung reagieren, können kooperative Fahrzeuge proaktiv agieren, um sich bspw. als Kolonne zu organisieren oder Spurwechsel untereinander abzustimmen. Das kooperative Fahren verbessert das autonome Fahren sowie das manuelle Fahren, indem Informationen über andere Verkehrsteilnehmer, den Straßenverkehr und Verkehrssignalinformation bereitgestellt werden. Neben dem klassischen Autobahnszenario sind die Gestaltungsmöglichkeiten von sogenannten Shared Spaces von größter Bedeutung. In gemischten Verkehrsszenarien können autonome Fahrzeuge zum Beispiel Konvois hinter nicht autonomen Fahrzeugen bilden, die autonome Fahrzeuge sicher durch innerstädtische Gebiete führen können.
Die Kooperation der Fahrzeuge stellt erhebliche Herausforderungen an Latenz und Zuverlässigkeit der Funkkommunikation, die im Rahmen dieses Dissertationsprojekts erforscht werden. Für die Untersuchungen wird eine in SocialCars erfolgreich genutzte Kopplung von Kommunikationsnetz- und Straßenverkehrssimulator eingesetzt. Die Interaktion zwischen Fahrzeugen und RSUs wird für Fahrzeugfolgemodelle, kooperativen Spurwechsel und kooperative Verkehrsinteraktionen modelliert. Dies ermöglicht es, die Auswirkungen verzögerungsbehafteter und unzuverlässiger Kommunikation auf die Verkehrssicherheit und den Verkehrsfluss zu bewerten. Die Forschung bewertet außerdem die Zuverlässigkeit kooperativer Fahrerassistenzsysteme und deren Leistung in Bezug auf den Passagierkomfort.
Forscher: Rahi Avinash Shet, M. Tech.
Studentische Forschungsarbeiten
2018
Investigation of CACC-ACC Controller Switching based on Communication Reliability (Sefa Yilmaz)